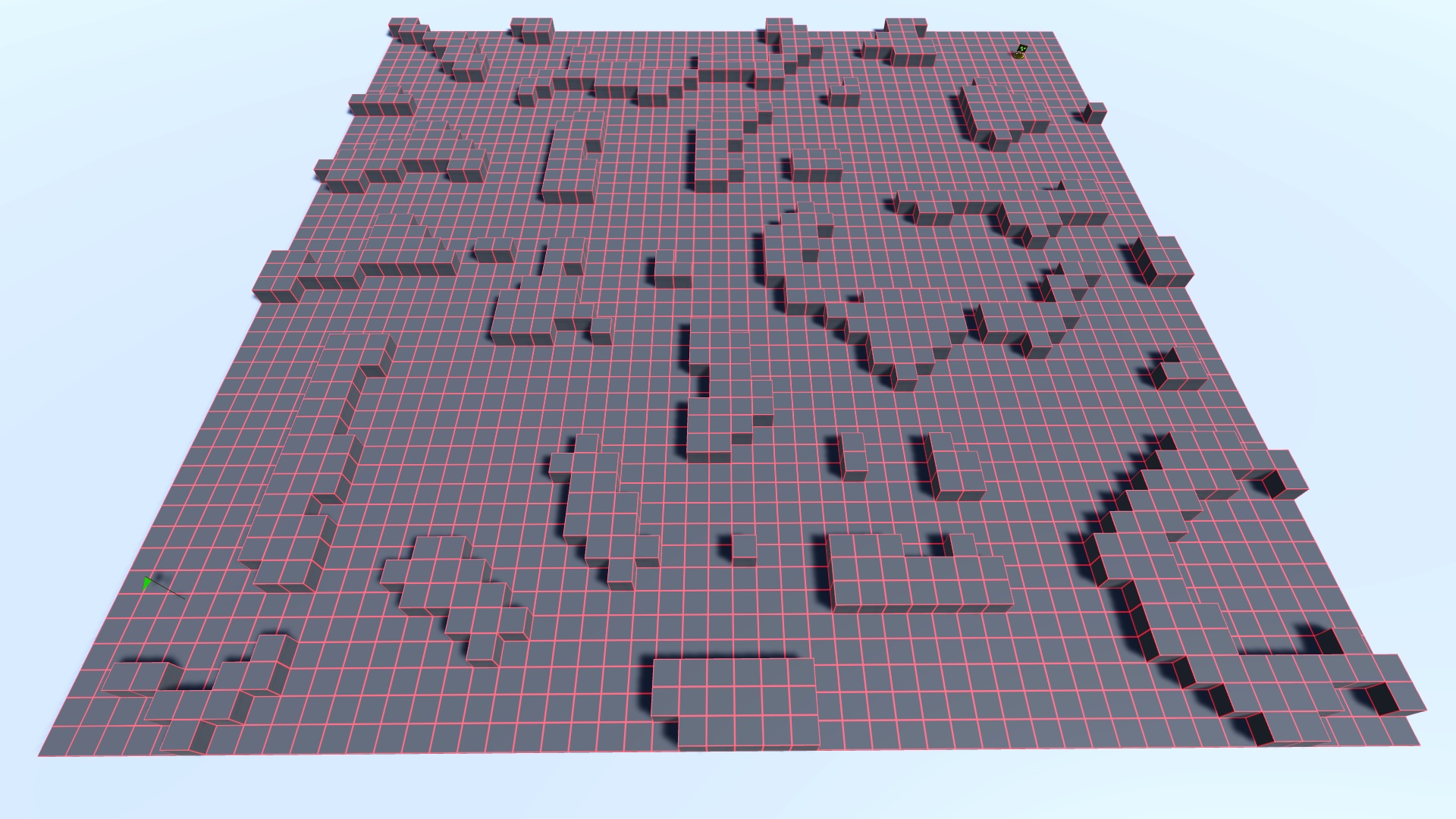
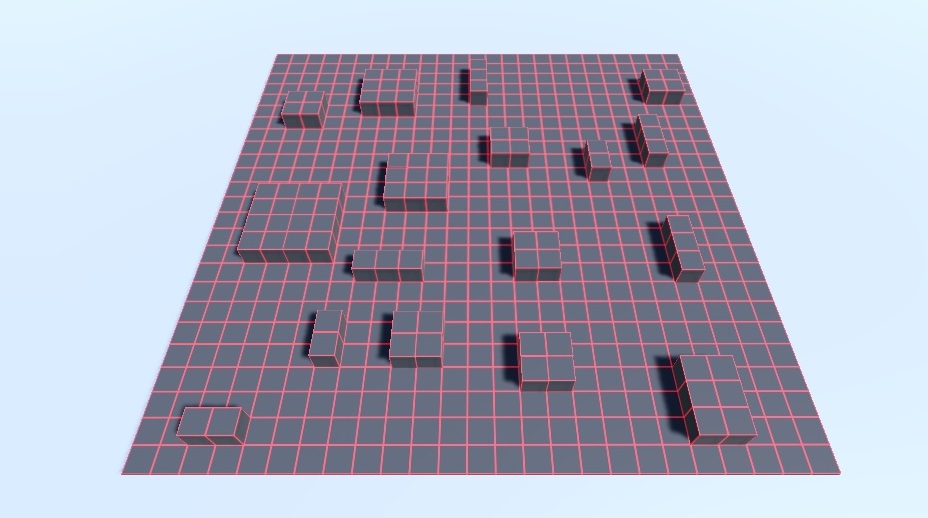
- The model trained by the generative adversarial network was given over 10.000 samples, 7500 of which were used as part of the training data set and the remaining 2500 for result evaluations.
- For the reinforcement learning model, the agent was trained for 50.000 - 200.000 iterations depending on size of the worlds.
- Our supervised transfer learning model was trained with over 4000 different environments, each with around 40 different variations, resulting in a total of 168.000 data samples. This model was only trained for 2D worlds. Please refer to our process page to learn about the limitations.